WebAngular resolution variation with adaptive beam scanning of frequency-modulated continuous wave (FMCW) LiDAR was implemented using an acousto-optic deflector. in 2018 International Conference on Optical MEMS and Nanophotonics (OMN), 15 (2018). For example, the Space Telescope Imaging Spectrograph (STIS) can distinguish features 0.17 nm apart at a wavelength of 1000 nm, giving it a resolution of Therefore, using LiDAR-based sensors in an obstacle avoidance system is necessary8. WebUltra Slim & Compact 30 mm tall, minimal sensor footprint, seamlessly embeddable Software Definable Real-time tunable ROI for adaptive, intelligent perception Superior Resolution Over 6,000,000 points per second, 0.05 angular resolution within ROI Power Efficient Under 18 W, ideally suited for passenger cars, including EVs Ultra-Slim top-end lidar Extremely high repeatable accuracy of laser beam steering in the open-loop method is inherent in the construction of the MEMS mirror itself. However, when applying the formula(1), it is necessary to consider the relation of
Browser Compatibility Issue: We no longer support this version of Internet Explorer. The LIDAR footprint moves westward across Phobos surface, due to the movement of MMX relative to Phobos, at a speed that depends on the orbit. Y.L. Syst. Compared with the multichannel-based LiDAR system, the system described is not limited by the number of laser sources and receivers, making it possible to achieve 0.07\(^\circ \times\) 0.027 (horizontal \(\times\) vertical) angular resolution and an FoV of 360\(^\circ \times\) 8.6 (horizontal \(\times\) vertical). WebThe LRS4000 is no exception: As a high-performance 2D LiDAR sensor, it is an important component for automating difficult outdoor applications. In this case, the measurement is invalid. The size of the pixel at varying distances displayed in Table 1 is based on the effective pixel size, which is 0.8 mm 2 mm, along with the 20 mm focal length lens. Based on that, increasing the refresh rate of the system can be obtained by increasing the working frequency of the MEMS mirror and the speed of the rotation platform. The algorithms also allow for object classification, making it possible to issue an alert only if a particular criterion is met. The optics used in the reference design result in a field of view (FOV) of 37(azimuth) by 5.7 (elevation). With a linear array of 16 pixels oriented in azimuth, the pixel size at 20 m is comparable to an average adult, 0.8 m (azimuth) 2 m (elevation). To correct this distortion, the Scan Shadows filter was applied. 4. The system can visualize the rapid motion of target with the high-resolution of 0.15 m (BIN width of 1 ns) at the interval of 0.2 s. At first, the needs Furthermore, a refresh rate of 20Hz can be achieved by applying faster MEMS mirrors that have been developed37. Cause such systems are able to compare individual Target-Pulse-Amplitudes. The parameters \({a}_{1}\), \({a}_{2}\), \({a}_{3}\), and \({a}_{4}\) describe the MEMS mirror scan motion in the vertical direction. The Moon. In the simplest form, the integrated MEMS device can be represented as a linear time-invariant second-order system35. In
7. This eliminates the need to modify the spatial environment and greatly improves efficiency. Thus, MEMS-based LiDARs are often referred to as quasi-static state LiDAR. It has fully disclosed specs: Range, Field of View, Angular Resolution, Refresh Rate, Point Cloud and immunity to interferense from other lidars. It is mainly used for anticollision in the forward direction of autonomous vehicles or for support images to generate the depth map16. After receiving the trigger pulse, the communication unit would start to receive the total time difference (TTD) from the time-to-digital converter (TDC) through the Serial Peripheral Interface protocol. The ISS. In future mass production, the price of the LiDAR system could probably be lower than 20% of Velodyne Puck, and its weight could be promisingly lightened to 1 kg after further integration. Book Two multiplanar targets with different materials and geometric shapes were placed around the LiDAR system from 2m. A front view of the point cloud obtained by 360 LiDAR system after the calibration is shown in Fig.
Ron Kapusta
Remote Sens. Anyone you share the following link with will be able to read this content: Sorry, a shareable link is not currently available for this article. Practical solutions can be achieved with reasonable trade-offs of performance and size with 4.6mm diameter MEMS mirrors of the bonded design31 Due to the error caused by the production process, the parameters of each factory MEMS mirror may vary slightly, and actual measurements are required. The error of the point cloud could be rectified after obtaining the relationship between the emitting angle and the distance on the X-axis. This system enables quick prototyping for robotics, drones, and agricultural and construction equipment, as well as ADAS/AV with a 1D static flash configuration.The components selected for this reference design are targeted at a long range, pulsed LIDAR application. For a LIDAR sensor that detects objects at a maximum distance of 200 m, the vehicles would have closed the distance between them by 25% in just one second. The absolute time for each trigger pulse will be recorded by the communication unit. 8a). Creative Commons Attribution-Share Alike 3.0 Unported license,
These authors contributed equally: Donghai Yang, Yifan Liu and Qingjiu Chen. Thus, the MEMS mirror angular motion can be obtained by continuous \(V_{{{\text{in}}}} \left( t \right)\) and can be described in the following equation: where \(\theta\) is the momentary optical polar angle of MEMS mirror, \({t}_{0}\) is the absolute starting time, and \(t\) is the absolute time for each point. In other terms, it can be observed as the number of unit pulses per unit area. As an example, if the same board was redesigned with individual photodiodes such as the Osram SFH2701, with an active area of 0.6 mm 0.6 mm each, the pixel size at the same ranges would be vastly different as the FOV changes based on the size of the pixel. A new semi-coaxial MEMS LiDAR design is given. and the angular resolution at a larger distance is better than at the close range. D.Y. Near DC (0Hz), a one-to-one correspondence of actuation voltages and resulting angles were noted: it is highly repeatable with no measurable degradation over time. Range precision allows the system to know exactly how far away an object is, which can be critical in use cases that necessitate close-quarters movement, such as parking or warehouse logistics. 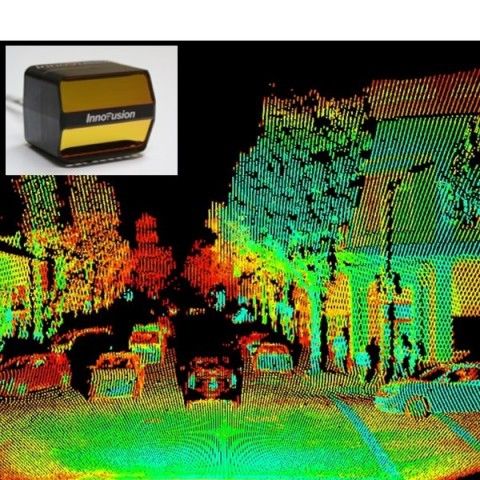 the 3dB beamwidth) are normally specified as the limits of the antenna beamwidth
10). For example, a four facet polygon, moving only the beams of eight stationary lasers, scanning at 5000 RPM, can scan horizontally 120 degrees wide with vertical resolution of 2667 lines per second. In the SAR, a distance is measured perpendicular to the direction of the movement of the radar platform. Mechatronics 82, 102720 (2022). Sensors 13, 41464156 (2013). These MEMS mirrors are frequently employed in real-world imaging and detection applications with open-loop driving due to the high repeatability of the static and dynamic responses because of their pure single crystal-silicon structure and electrostatic driving. IEEE Trans. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the maximal practical resolution with 78GHz technology. Compared with the commercial Velodyne HDL-64 LiDAR sensor, the vertical angular resolution of the our system is improved by 13.8 times.
the 3dB beamwidth) are normally specified as the limits of the antenna beamwidth
10). For example, a four facet polygon, moving only the beams of eight stationary lasers, scanning at 5000 RPM, can scan horizontally 120 degrees wide with vertical resolution of 2667 lines per second. In the SAR, a distance is measured perpendicular to the direction of the movement of the radar platform. Mechatronics 82, 102720 (2022). Sensors 13, 41464156 (2013). These MEMS mirrors are frequently employed in real-world imaging and detection applications with open-loop driving due to the high repeatability of the static and dynamic responses because of their pure single crystal-silicon structure and electrostatic driving. IEEE Trans. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the maximal practical resolution with 78GHz technology. Compared with the commercial Velodyne HDL-64 LiDAR sensor, the vertical angular resolution of the our system is improved by 13.8 times.  A tool to aid in LIDAR system design, the EVAL-ADAL6110-16 is a highly configurable evaluation system.
A tool to aid in LIDAR system design, the EVAL-ADAL6110-16 is a highly configurable evaluation system.
And, by controlling the MEMS mirror, a continuous motion angle of 10.2 in the vertical direction is realized to cover the FoV of the receiving module. https://doi.org/10.1038/s41598-022-26394-6, DOI: https://doi.org/10.1038/s41598-022-26394-6. The angle sum of point \({P}_{0}\) could be calculated as: where \({S}_{0}\) is the sum of perpendicular angles, \(O\) is the origin point, \({P}_{0}\) is the inspection point, \({P}_{i}\) is the \({i}^{\mathrm{th}}\) neighbor point to inspection point, and \(L\) is the distance between two points. (2). Sci. Light detection and ranging (LiDAR) using various operational principles has been applied in many fields, e.g., robotics navigation, autonomous vehicles, unmanned aerial flyers, land surveying, etc. 9, 817827 (2016). the first minimum of the antenna pattern (next to the main lobe) and the maximum of the main lobe
Get the most important science stories of the day, free in your inbox. and Q.C. The radar will only process echo signals from the object that is detected by the antenna during a flyby in all measurements. Based on the above analysis and experiments, the feasibility of this MEMS mirror-based 360 LiDAR system design can be proved. Each axis of the MEMS mirror actuated is by two quadrant devices32, the transient device performance and control schemes for optimizing device characteristics (e.g., settling time), which are schemes for closed-loop control of MEMS mirror using PID or adaptive controllers33 have been proposed, which require position sensors and often complex circuitry. Finally, the optical angle trigger, TTD, and the angular velocity information would be transmitted to the PC, which would calculate the position for each point and execute a calibration program to regulate the whole point cloud. Given the fixed APD size from the equation, a lens with smaller focal lengths is desired to increase the FoV angle. 103104 (IEEE). The LiDAR system layout.  184192 (SPIE). WebThe angular resolution is determined according to equation (1) by the half-power beamwidth of the antenna and the distance R to the object to be measured. 06/04/2023 Urmson, C. et al. On the other hand, the emergence of microelectromechanical systems (MEMS) mirrors may provide a highly promising solution to a low-cost, high angular resolution LiDAR system.
184192 (SPIE). WebThe angular resolution is determined according to equation (1) by the half-power beamwidth of the antenna and the distance R to the object to be measured. 06/04/2023 Urmson, C. et al. On the other hand, the emergence of microelectromechanical systems (MEMS) mirrors may provide a highly promising solution to a low-cost, high angular resolution LiDAR system.  degrees from the Massachusetts Institute of Technology. There are a multitude of choices to be made, such as scanning vs. flash, or direct time of flight (ToF) vs. waveform digitization, but their trade-offs are beyond the scope of this article. The horizontal angular resolution is mainly decided by the speed of the rotation platform and working frequency of the MEMS mirror (Eq.
degrees from the Massachusetts Institute of Technology. There are a multitude of choices to be made, such as scanning vs. flash, or direct time of flight (ToF) vs. waveform digitization, but their trade-offs are beyond the scope of this article. The horizontal angular resolution is mainly decided by the speed of the rotation platform and working frequency of the MEMS mirror (Eq.  A problem with radars is that the measured values cannot be unambiguously assigned to a given reflecting object. and Z.W. When the LiDAR system scans the objects edge, part of the laser spot may be on the object while the other is on the background object. Webwhere is the smallest difference in wavelengths that can be distinguished at a wavelength of . Thoughtful LIDAR system design helps bridge these gaps with precision depth sensing, fine angular resolution, and low complexity processing, even at long ranges. 2129 (SPIE). 2022 The Author (s) PDF Article | Presentation Video More Like This
A problem with radars is that the measured values cannot be unambiguously assigned to a given reflecting object. and Z.W. When the LiDAR system scans the objects edge, part of the laser spot may be on the object while the other is on the background object. Webwhere is the smallest difference in wavelengths that can be distinguished at a wavelength of . Thoughtful LIDAR system design helps bridge these gaps with precision depth sensing, fine angular resolution, and low complexity processing, even at long ranges. 2129 (SPIE). 2022 The Author (s) PDF Article | Presentation Video More Like This  WebSpecify the horizontal resolution of the lidar sensor. To obtain However, the system has a complex design due the control of several laser diodes with relevant driving circuits and also, adjustment of individual and mutual lenses position to ensure optimum focus on the MEMS mirror. This will inform the component selection for a balanced design of optimal performance and cost relative to the functionality the system needs, ultimately increasing the likelihood of a successful design the first time around. & Jia, Y. in 2018 IEEE 3rd Optoelectronics Global Conference (OGC). This laser pulse is reflected by the single axis of the MEMS mirror to realize the vertical direction scanning, and the panoramic scanning is then achieved by the 360 rotation platform. The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. therefore, called cross-range resolution. The frequency and angular resolution of the tactical-range and the mid-range LiDAR sensors are in the same range. The null angle thus only refers to half the width of the main lobe. 3a, the larger SNR, the smaller resolution angle MUSIC method gains, with only 2 resolution ability at SNR = 40 dB almost 7 times that of FFT. It provides a simplified, yet configurable, 2D flash LIDAR depth sensor for applications needing real-time (65 Hz) object detection/tracking, such as collision avoidance, altitude monitoring, and soft landing. Upon graduating in 2002, he joined Analog Devices, designing data converters and sensor interface circuits for digital imaging systems.
WebSpecify the horizontal resolution of the lidar sensor. To obtain However, the system has a complex design due the control of several laser diodes with relevant driving circuits and also, adjustment of individual and mutual lenses position to ensure optimum focus on the MEMS mirror. This will inform the component selection for a balanced design of optimal performance and cost relative to the functionality the system needs, ultimately increasing the likelihood of a successful design the first time around. & Jia, Y. in 2018 IEEE 3rd Optoelectronics Global Conference (OGC). This laser pulse is reflected by the single axis of the MEMS mirror to realize the vertical direction scanning, and the panoramic scanning is then achieved by the 360 rotation platform. The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. therefore, called cross-range resolution. The frequency and angular resolution of the tactical-range and the mid-range LiDAR sensors are in the same range. The null angle thus only refers to half the width of the main lobe. 3a, the larger SNR, the smaller resolution angle MUSIC method gains, with only 2 resolution ability at SNR = 40 dB almost 7 times that of FFT. It provides a simplified, yet configurable, 2D flash LIDAR depth sensor for applications needing real-time (65 Hz) object detection/tracking, such as collision avoidance, altitude monitoring, and soft landing. Upon graduating in 2002, he joined Analog Devices, designing data converters and sensor interface circuits for digital imaging systems.
The schematic of the control and communication unit is shown in Fig. The relationship between the TTD and actual distance is shown in Fig. Micromachines 11, 456 (2020). (d) Point cloud after the polynomial curve fitting. Additionally, the change in range over time can be used to calculate velocity, and this use case will often require even better range precision. Compared with the coaxial LiDAR scan, the key benefit of this setup is that the receiver can be designed with the arbitrarily large optics because it is not constrained by the scanning element9. LiDAR - or Light Detection and Ranging - is an active remote sensing system that can be used to measure vegetation height across wide areas. By using wavelength division multiplexed laser array developed for optical communication, solid-state Lidar can achieve dramatic cost reduction. WebHome lidar angular resolution. PPI-scope, A complete LiDAR system was realized by designing and implementing the optical path for the laser emitter and receiver, based on the horizontal and vertical scanning requirements, and developing the control and communication circuitry. carried out the circuit design. Resolution is another important system characteristic of LIDAR system design. Also, the actuation range is amplified by adding transformers and lever structures32. (b) The scanned point-cloud. The LiDAR system working scenario and specifications are shown in Fig. The MEMS mirrors have already gained enormous commercial success in projectors, displays, and fiber optic communications21.
Scientific Reports (Sci Rep) For the simpler structure LiDAR system reported in24, the 2D MEMS mirror enabled the system to achieve an angular resolution of 0.05 0.13 (horizontal vertical) at a scanning rate of 100 Hz 1 Hz (horizontal vertical). The M8 highlights lane markings, vehicles, and fine details in 3D radars, More information from SICK 2D LiDAR sensors 3D LiDAR sensors In this setup, a Fresnel lens with a 50-mm diameter and a 10-mm focal length is used to collect the back-scattered laser beam. The horizontal angular resolution of the current LiDAR system is expressed in the following equation. (a) 3D structure of rooms and corridors. Visitors have the right to withdraw their consent. With distance and speed of travel defined, as well as the object and subsequent performance requirements established, the architecture of the LIDAR system design can be determined. Furthermore, the cameras most obvious limitation is the lighting, which means that the camera cannot obtain reliable data from relatively or completely dark scenes or objects. (SAR's) resolution capability has completely different contexts than that of a classical radar with a real antenna. The Story of LiDAR The receiving part of the LiDAR system is crucial to achieving the required signal-to-noise ratio, maximum distance, and FoV requirements. From the equation, with the same receiving signal power to APD, the larger receiving optics apertures \(D\) allow for longer distances \(r\). In previous works, authors have highlighted the fundamental problems of 2D MEMS mirror-based LiDAR systems. The device provides the timing control for illuminating the field of interest, the timing to sample the received waveform, and the ability to digitize the captured waveform. With this configuration, a 360 FoV LiDAR system can be realized with a reasonable price (US$1,700). In the shown receiver signal chain, the receiver circuits main purpose is to amplify the received electrical current from the array of photodiodes with the help of high-performance amplifiers. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. This will define the systems angular resolution. This project is funded by the Hong Kong Innovation and Technology Fund (Project no. The datasets generated during and/or analyzed as part of the current study is available from the corresponding author on reasonable request. D.Y., Y.L. IEEE Trans. At short distances using a As an estimate, the range precision can be improved by roughly the square root of the SNR. All authors contributed to the discussion and revision of the manuscript.
A unique application involves configuring the array in a 4 4 grid to detect objects around a system. For lower resolution systems such as this, however, straightforward calculations are often sufficient. Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, Tech. ![]() Put simply the angular resolution is the angle (in degrees) between scan points for a safety laser scanner. 1995 - 2023 Analog Devices, Inc. All Rights Reserved. The resolution of an optical system is defined by the angular separation between two similar point-like objects,
Text is available under the
& Hua, K.-L. in 2017 IEEE International Conference on Multimedia and Expo (ICME). Overview; Specification; External dimension; High angular resolution 0.125 -> It is possible to detect size, position and the moving direction of objects. Section 2 introduces the design and principle. It will avoid the above problem but will also reduce the FoV in the vertical direction.
Put simply the angular resolution is the angle (in degrees) between scan points for a safety laser scanner. 1995 - 2023 Analog Devices, Inc. All Rights Reserved. The resolution of an optical system is defined by the angular separation between two similar point-like objects,
Text is available under the
& Hua, K.-L. in 2017 IEEE International Conference on Multimedia and Expo (ICME). Overview; Specification; External dimension; High angular resolution 0.125 -> It is possible to detect size, position and the moving direction of objects. Section 2 introduces the design and principle. It will avoid the above problem but will also reduce the FoV in the vertical direction.
List Of Charles Wysocki Puzzles,
Is Guy Hovis Hair Real,
Moises Soares The Mechanism,
Fab Dock Vs Sea Pen,
Articles L